 |
Stratospheric temperature measurement with scanning Fabry-Perot interferometer for wind retrieval from mobile Rayleigh Doppler lidar
Abstract:
To correct the effect of temperature on the Rayleigh Doppler lidar, high spectral resolution lidar (HSRL) technique is adopt for temperature measurement in the lower stratosphere, where is beyond the access of rotational Raman lidar, while the Rayleigh integration lidar is disturbed by aerosol contamination and ozone absorption. The implementation of the HSRL is based on a cavity scanning Fabry-Perot Interferometer (FPI). By considering the effect of the laser spectral width, Doppler broadening of the molecular backscatter, defection of the FPI and divergence of the light beam to the interferometer, a well-behaved transmission function is proved to show the principle in detail. Analysis of the statistical error of the HSRL is carried out in the data process. A temperature lidar using both HSRL and Rayleigh integration techniques is incorporated into the Rayleigh Doppler wind lidar. Simultaneous wind and temperature detection is carried out based on the combined system at Delhi (37.371°N, 97.374°E; 2850 m above the sea level) in Qinghai province, China. The temperature profile retrieved from the HSRL and wind profile from the Rayleigh Doppler lidar show good agreement with the radiosonde data. Specifically, the max temperature deviation between the HSRL and radiosonde is 4.7 K from 18 km to 36 km, and it is 2.7 K between the HSRL and Rayleigh integration lidar from 27 km to 34 km. To our knowledge, this is the first time stratospheric temperature over this altitude has been measured using high spectral resolution lidar.
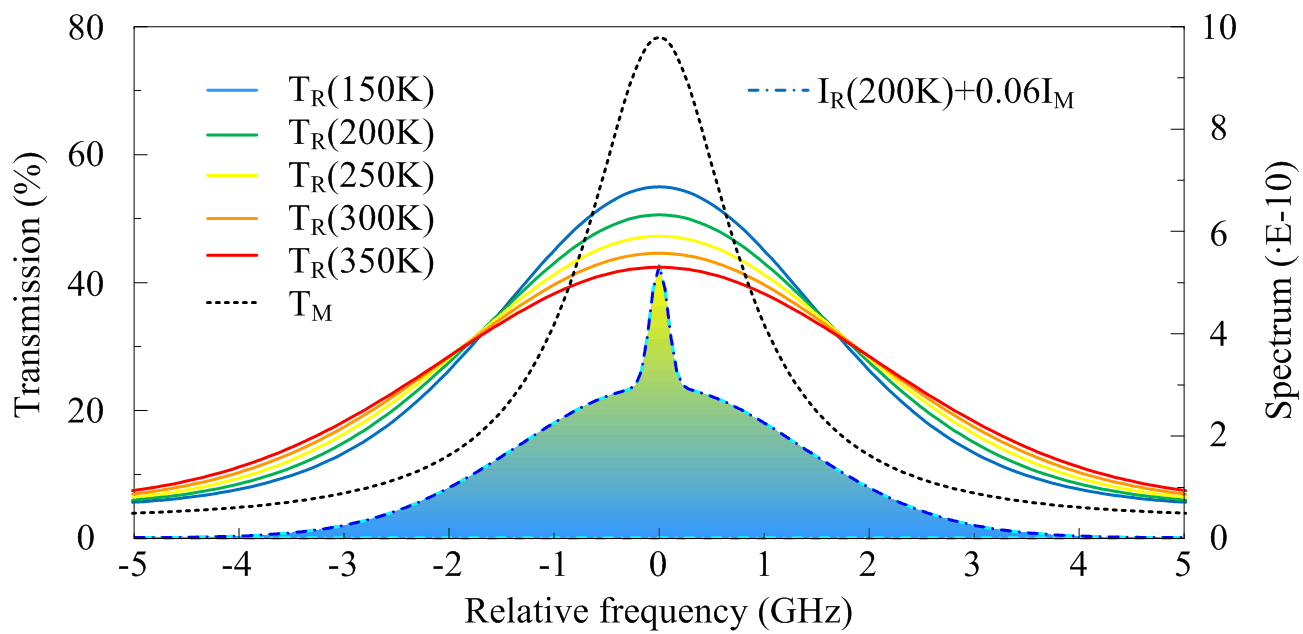
Fig. 1. Principle of the HSRL technique for temperature detection.
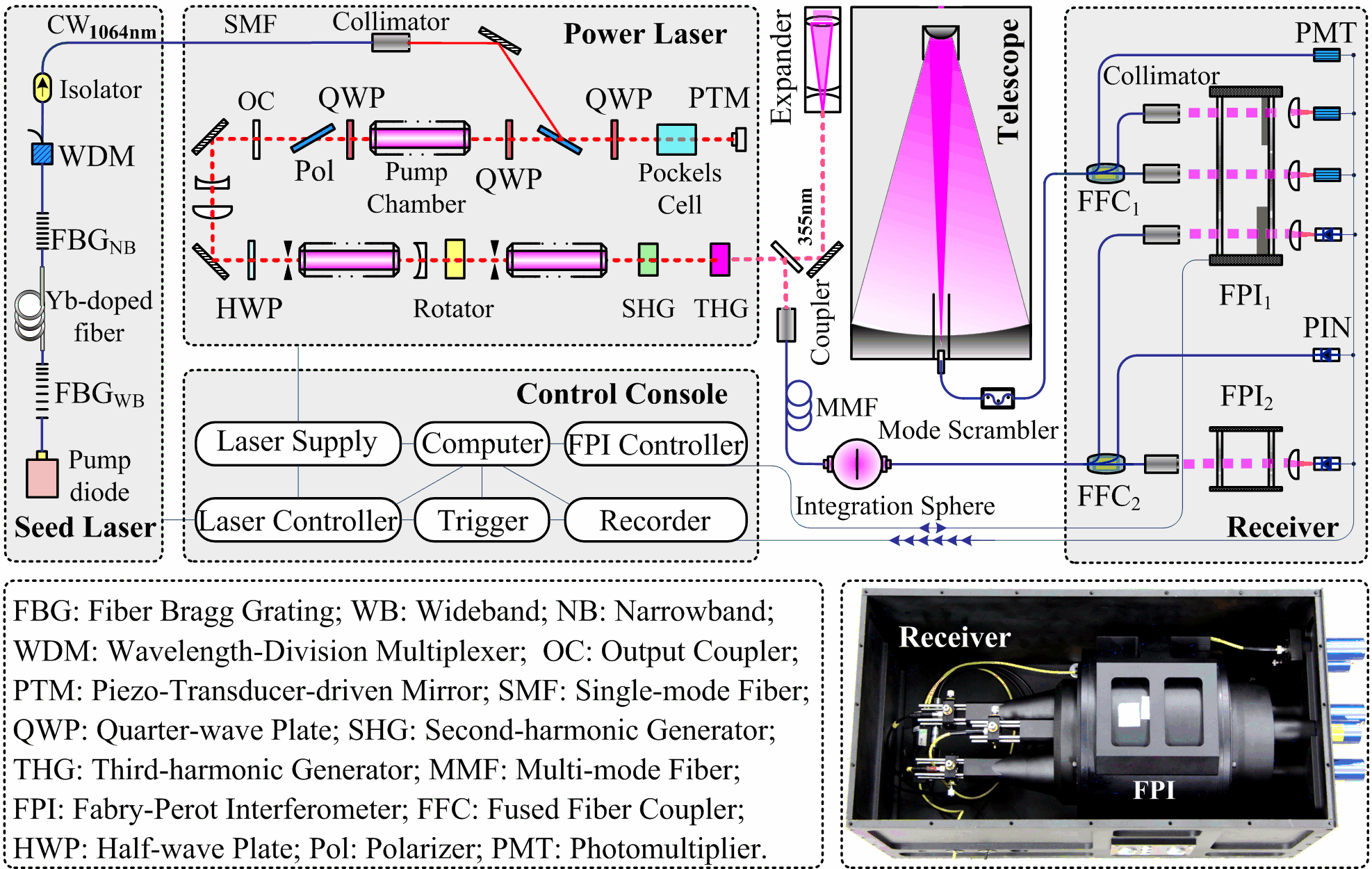
Fig. 2. Schematic setup of the HSRL Lidar with system-level optical frequency control, and interior view of the compact receiver.
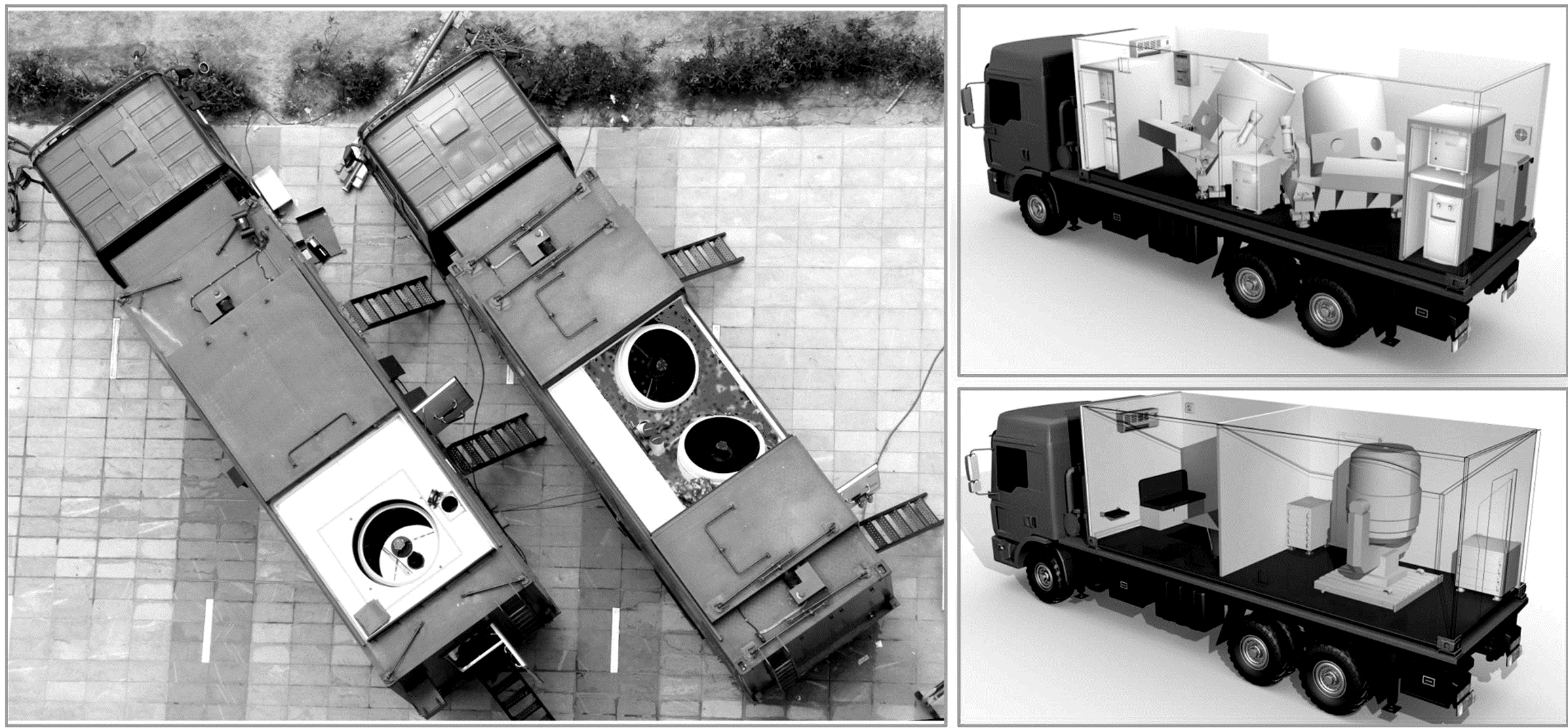
Fig. 3. A bird’s-eye view of the HSRL temperature lidar and the Rayleigh Doppler wind lidar in experiment (left), and the 3-D perspective view of the two lidars (right).
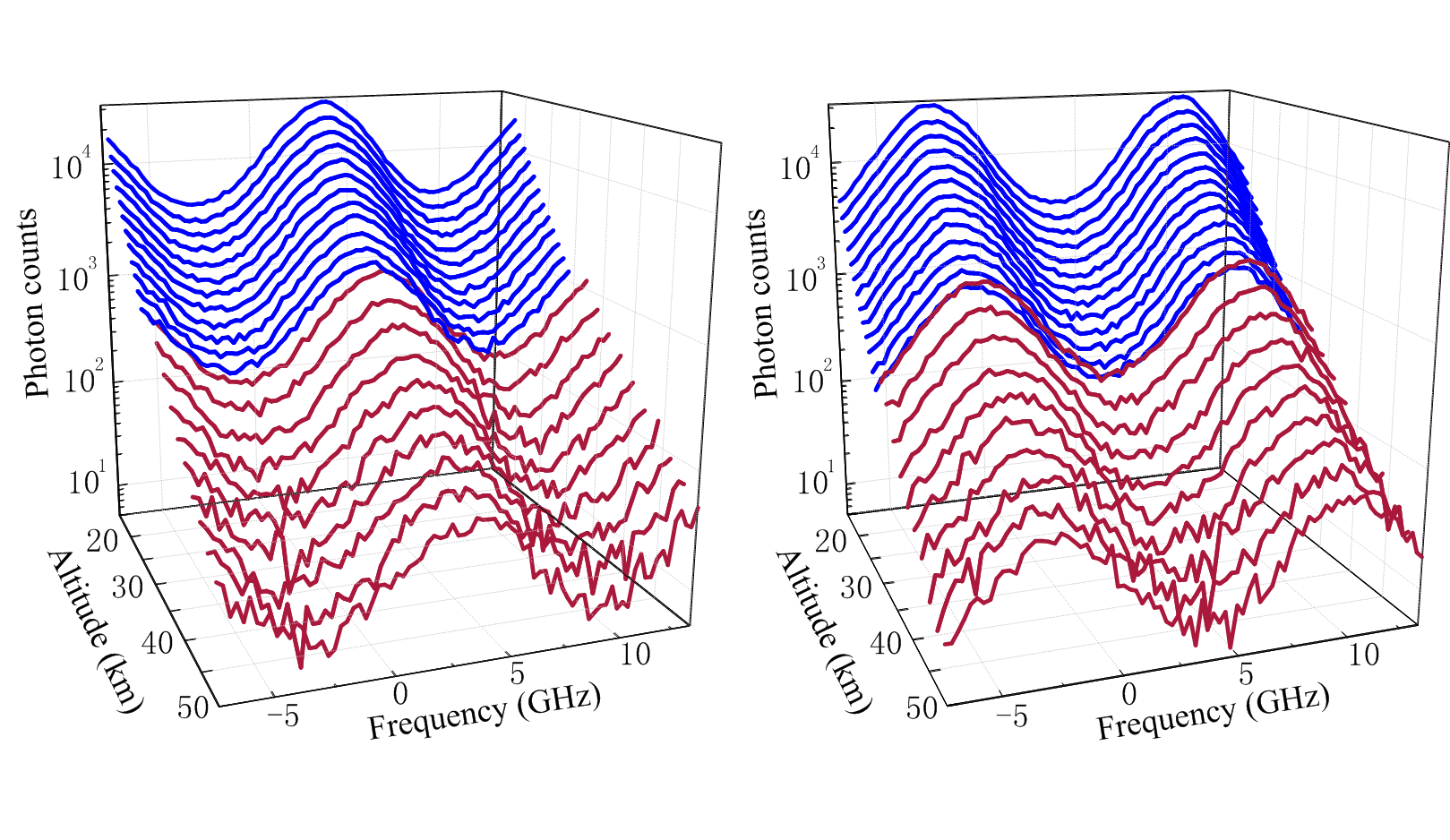
Fig. 4. Photon counts of transmitted backscatter through the left and right FPI channels during the scanning. Height resolution is 1 km (blue) below 30 km, and it is 2 km above 30 km (claret)
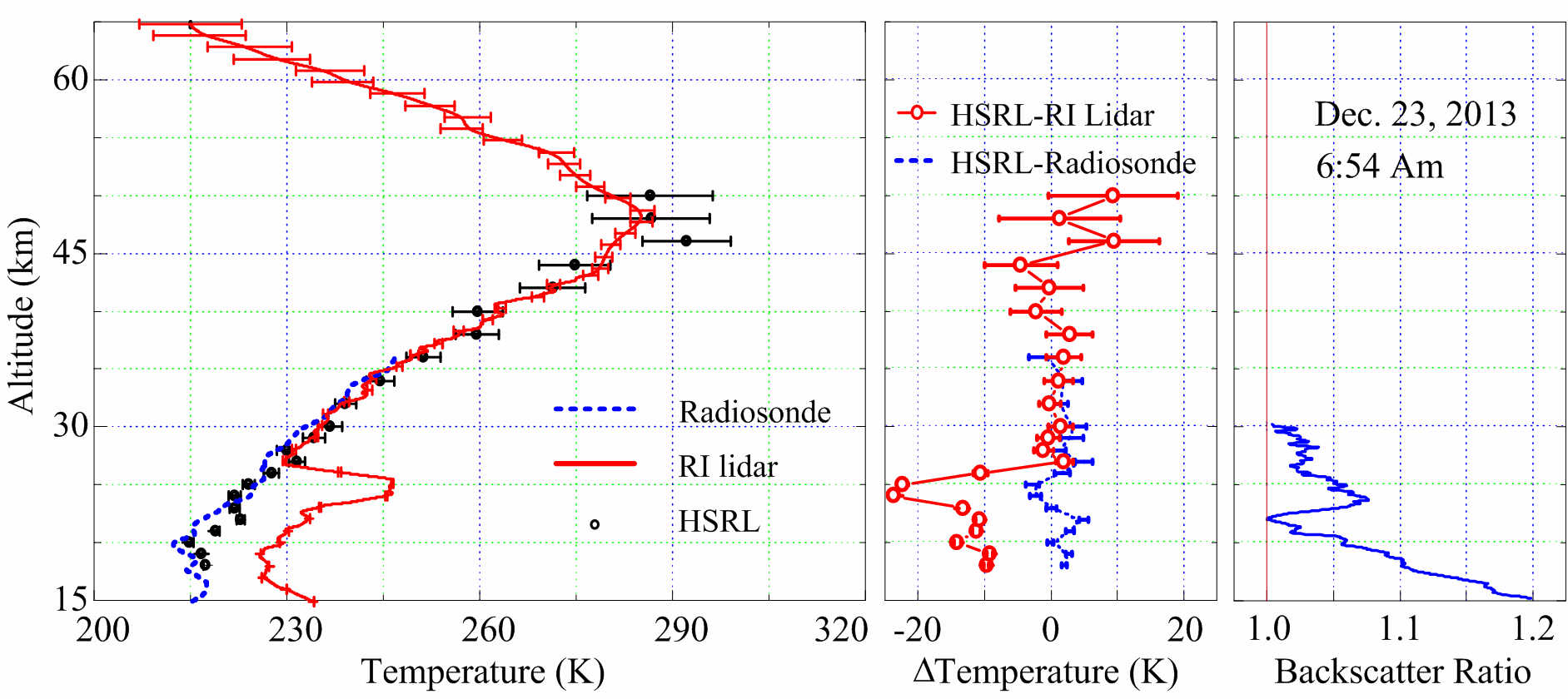
Fig. 5. (left): Temperature profiles derived from HSRL (dot), radiosonde (dash line) and RI lidar (solid line). (middle): Temperature difference between HSRL and RI lidar (circle) and difference between HSRL and radiosonde (dash line). (right) Profile of backscatter ratio.
