 |
Remote sensing of raindrop size distribution using the coherent Doppler lidar
Abstract:
The coherent Doppler wind lidar (CDL) shows capability in precipitation detection. Retrieval of the raindrop size distribution (DSD) using CDL is still challenging work, as both accurate backscattering cross section at the working wavelength and reflectivity spectrum of raindrop are required. Firstly, the Mie theory and the vectorial complex ray model (VCRM) are applied to calculate backscattering cross section for small spheric raindrops and large oblate raindrops, respectively. Secondly, an iterative deconvolution method is proposed to separate the reflectivity spectrum of raindrop from the lidar power spectrum, which is a superposition of rain and aerosol components. An accompanying aerosol signal model considering the effect of temporal window, from the same height and time, is used to improve the accuracy and robustness of the iteration. In experiment, a co-located micro rain radar (MRR) is used for comparison. Good agreements are obtained despite tremendous differences in wavelength and scattering characteristics. As an example, at 600m height, the R² of linear fitting to the mean rain velocity and mean raindrop diameter between CDL and MRR are 0.96 and 0.93, respectively.
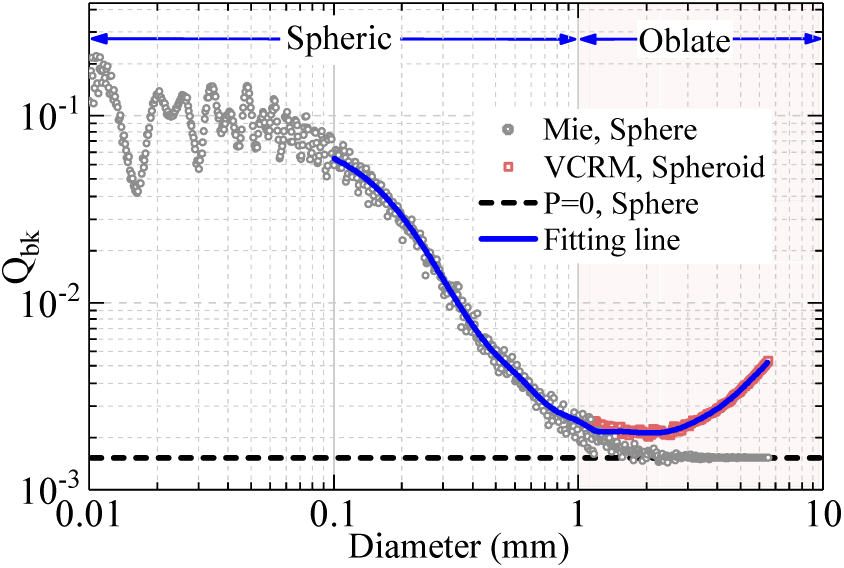
Fig. 1.Scatter plot and fitting line of backscattering efficiency versus the drop diameter between 0.01 and 6 mm. The gray circles are calculated using the Mie theory for spheric drops. The red squares are calculated using VCRM for oblate spheroids. The dashed line corresponds to the geometric optical limit of P=0 (i.e., external reflection) for spheric drops.
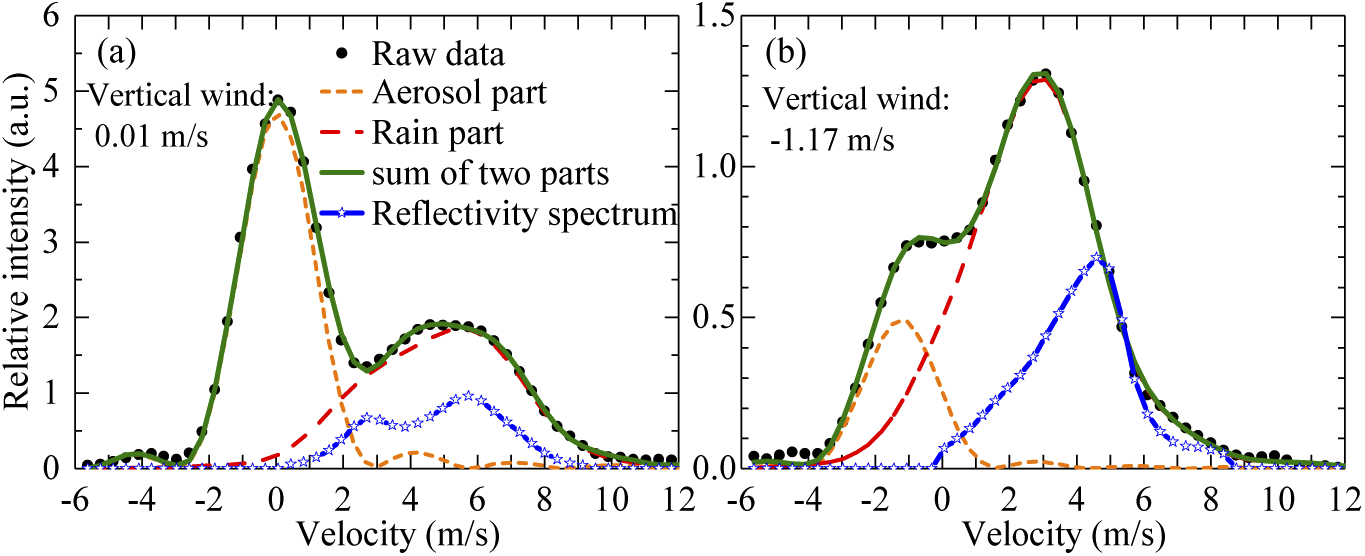
Fig. 2.Two examples of iterative deconvolution. (a) The aerosol peak is higher than the rain peak and the vertical wind velocity is near zero, (b) the rain peak is higher than the aerosol peak, and an upward wind of −1.17 m/s exists.
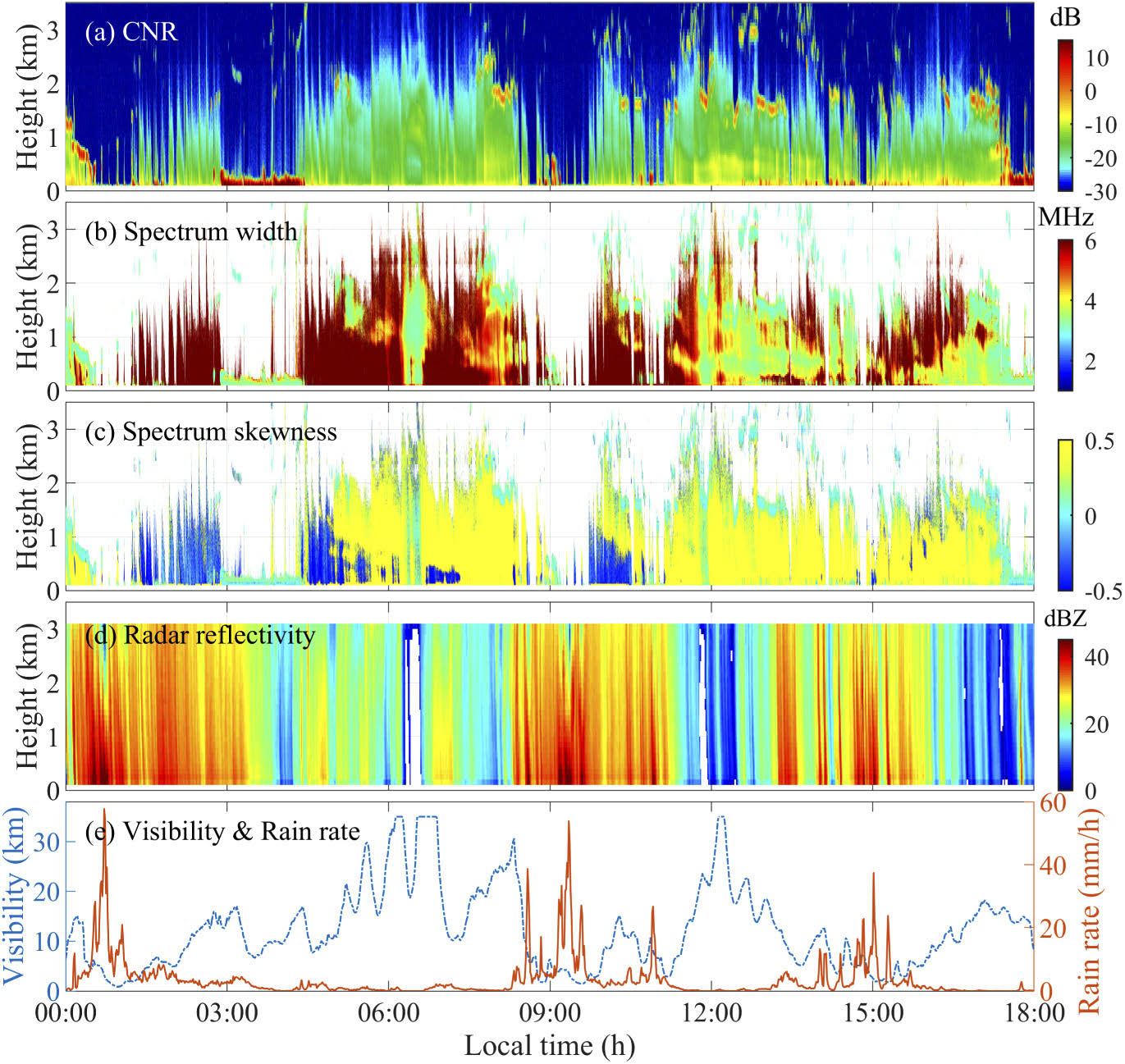
Fig. 3.Observation results of CDL and MRR during a continuous precipitation event on June 13, 2020. (a) The wideband carrier-to-noise ratio of CDL, (b) spectrum width of CDL, (c) spectrum skewness of CDL, (d) attenuated radar reflectivity of MRR, (e) horizontal visibility and rain rate on the ground level.
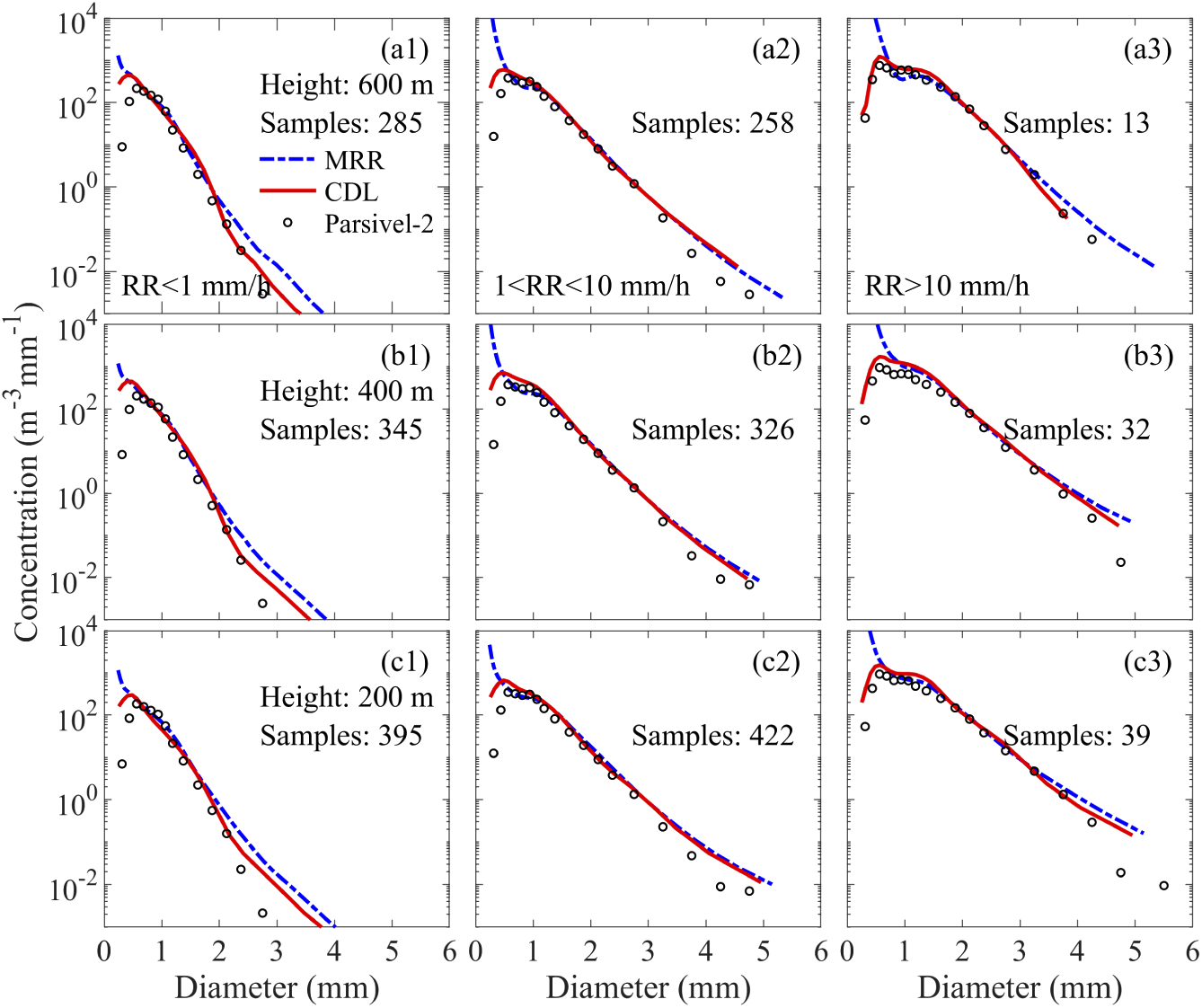
Fig. 4.Comparisons of the averaged DSDs between the CDL and MRR. (a1-3) the averaged DSD at the height of 600 m with different rain rates; (b1-3) the same as (a) but at the height of 400 m; (c1-3) the same as (a) but at the height of 200 m. The ground-level DSDs from Parsivel-2 are also plotted. The dataset is the same as Fig. 3.
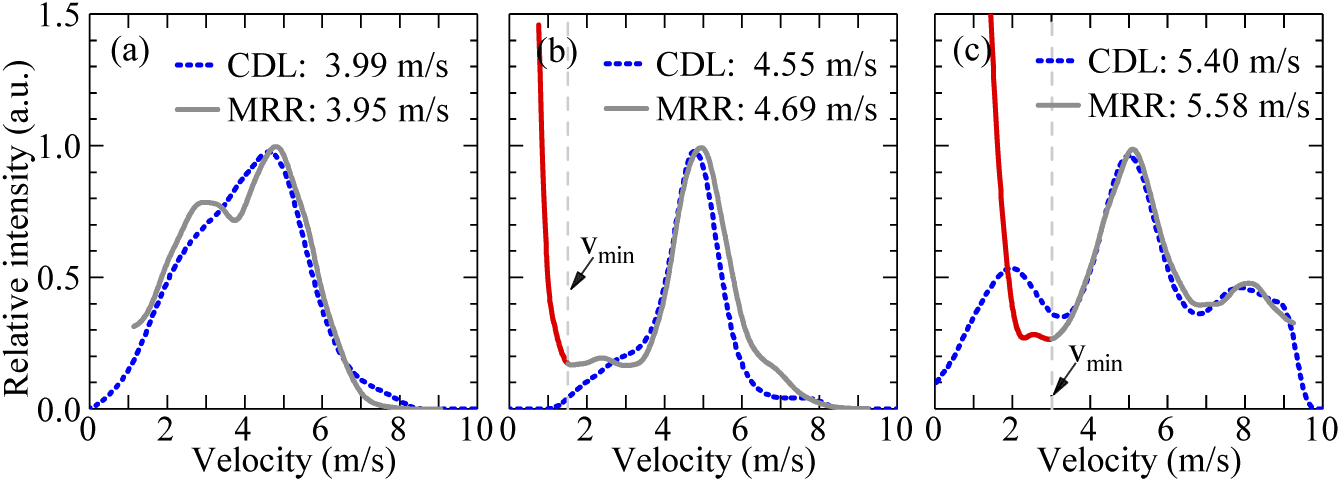
Fig. 5. Examples of reflectivity spectrum of CDL and MRR in the sense of light scattering. The values of mean rain velocity are also given. vmin is the lower limit in calculating the mean rain velocity.
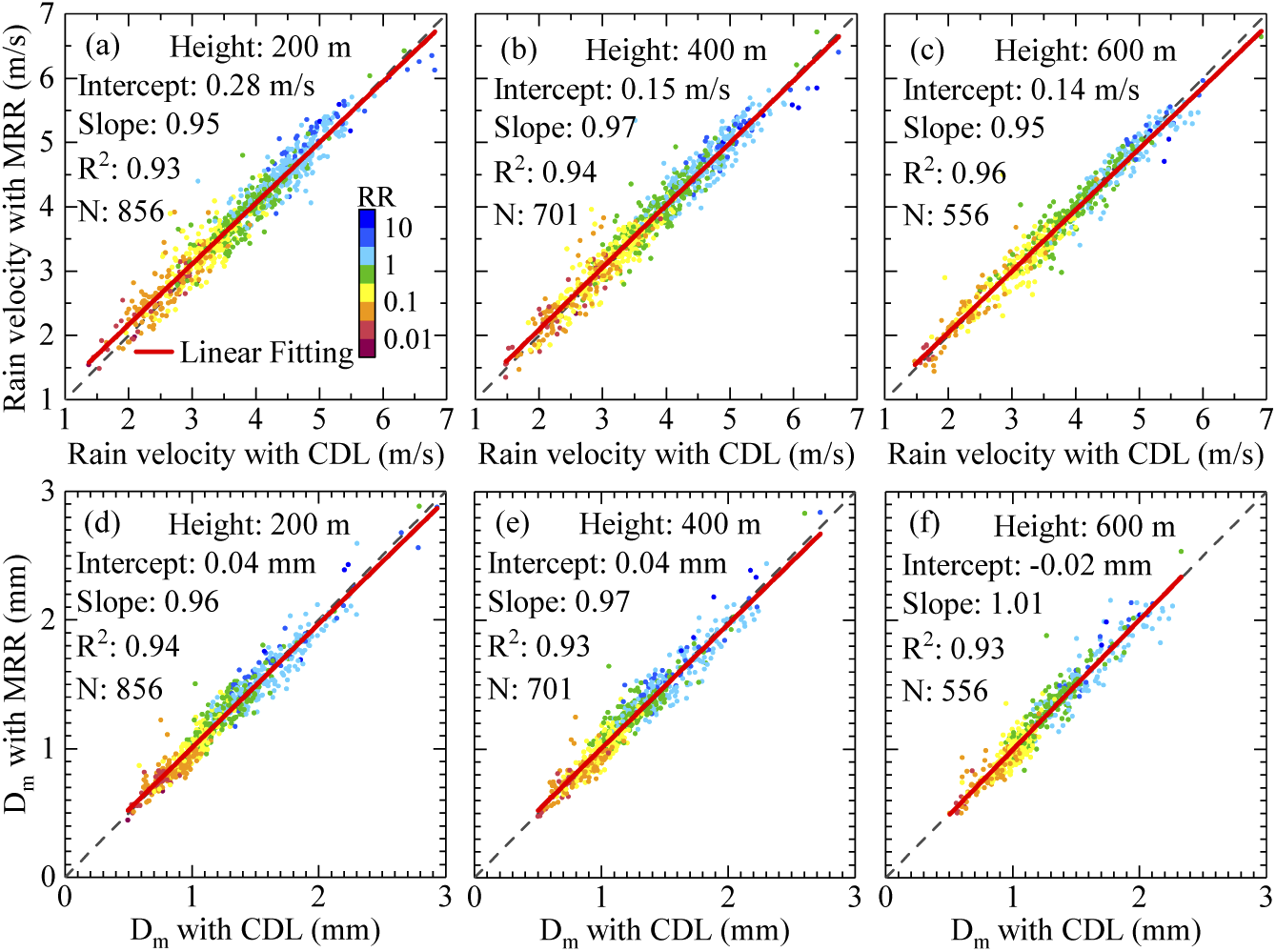
Fig. 6. Comparisons of mean rain velocity (a-c) and mean diameter (d-f) between the CDL and MRR at different heights. The linear fitting results and number of samples are also given. The color of the scatters corresponds to the rain rate. The dataset is the same as Fig. 3.
